
水声通信仿真报告
Underwater acoustic communication Simulation report
1.水声通信仿真模型
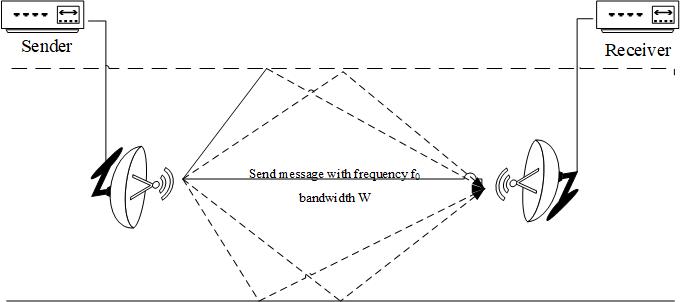 图一、水声通信仿真模型
图一、水声通信仿真模型瑞利信道
瑞利信道:采样频率选取80Khz,由于水声信道衰弱可以暂时简化,只考虑五条路径,路径长度假设为[100,115,130,160,220,250]。由于水下声速大概为1450-1540m/s,因此相较于直线传播的时延设置为[0 15 30 60 120 150]/1.5e3。
信道增益设置为[0 -10 -13 -15 -18 -22]。
采用Matlab自带函数构造瑞利信道:
高斯信道
高斯信道即为恒参信道,即信号通过信道后叠加一个高斯噪声,其中k为信噪比单位为dB,如下所示:
3. 仿真结果
- 4FSK、8FSK在高斯信道、瑞利信道和莱斯信道,不同信噪比下的误码率:
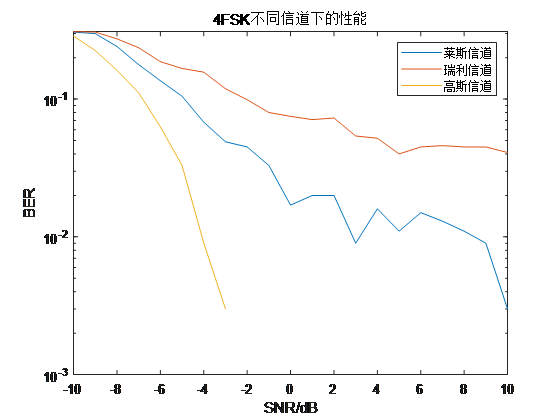 a.4FSK不同信道下误码性能对比
a.4FSK不同信道下误码性能对比
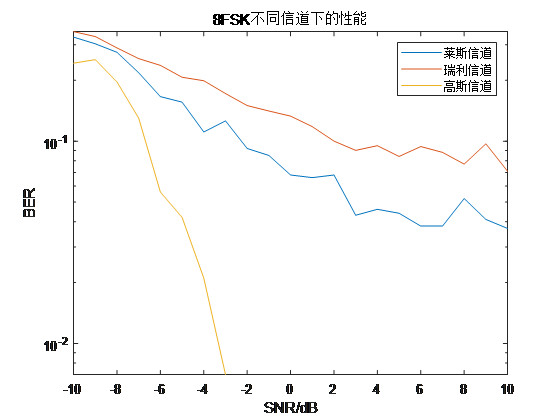 b.8FSK不同信道下误码性能对比
b.8FSK不同信道下误码性能对比- 4FSK、8FSK在 [-10,10]噪声强度下的平均误码率对比
| 信道 | 4FKS | 8FSK |
|---|---|---|
| 高斯信道误码率 | 0.0425 | 0.0.452 |
| 瑞利信道误码率 | 0.1201 | 0.1609 |
| 莱斯信道误码率 | 0.0764 | 0.1144 |
</center>
分析:
- 4FSK在莱斯信道中传播误码率相比8FSK降低了7.4%。
- 4FSK在瑞利信道中传播误码率相比8FSK降低了21.07%。
- 4FSK在高斯信道中传播误码率相比8FSK降低了20.2%。
通过仿真结果可以看出,误码率随着信噪比的升高而降低,与符合理论计算值。实验中加入了保护间隔,序列长度为1000。
结论:
- 4FSK在相同信噪比时,不论是在高斯信道、瑞利信道还是莱斯信道误码率都要小于8FSK,说明4FSK相比8FSK的抗噪性能会更好。
- 同样的信噪比下不论是通过4FSK还是8FSK调制,高斯信道的误码率要小于莱斯信道小于瑞利信道。
水声通信冲激响应
Underwater acoustic communication impulse response
1. 通过MATLAB进行仿真
水声信道可以用瑞利信道进行模拟:
水下声速:1500m/s 多径长度:[100 115 130 160 220 250] (m)
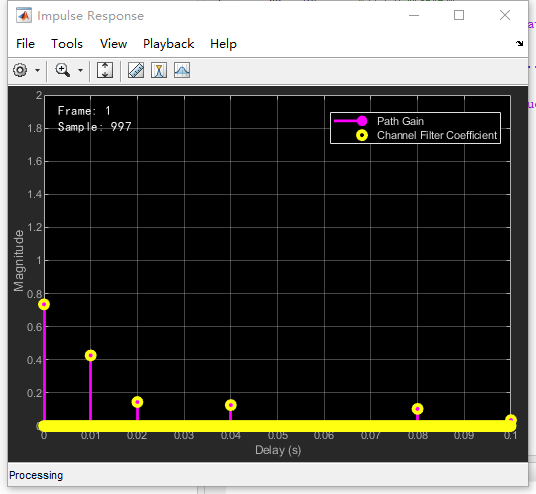 图1冲激响应仿真
图1冲激响应仿真- 程序:
1
2
3
4
5
6
7
8
9
10
11fs = 8e4; %采样频率 % Hz
pathDelays = [0 15 30 60 120 150]/1.5e3; %设收发距离为100m,声速1500m/s
avgPathGains = [0 -10 -13 -15 -18 -22];%信道增益
fD = 30; %最大多普勒频移
rchan = comm.RayleighChannel('SampleRate',fs, ...
'PathDelays',pathDelays, ...
'AveragePathGains',avgPathGains, ...
'MaximumDopplerShift',fD, ...
'Visualization','Impulse and frequency responses');
x = randi([0 1],1000,1);
y = rchan(x);2. 文献调研的实际冲激响应
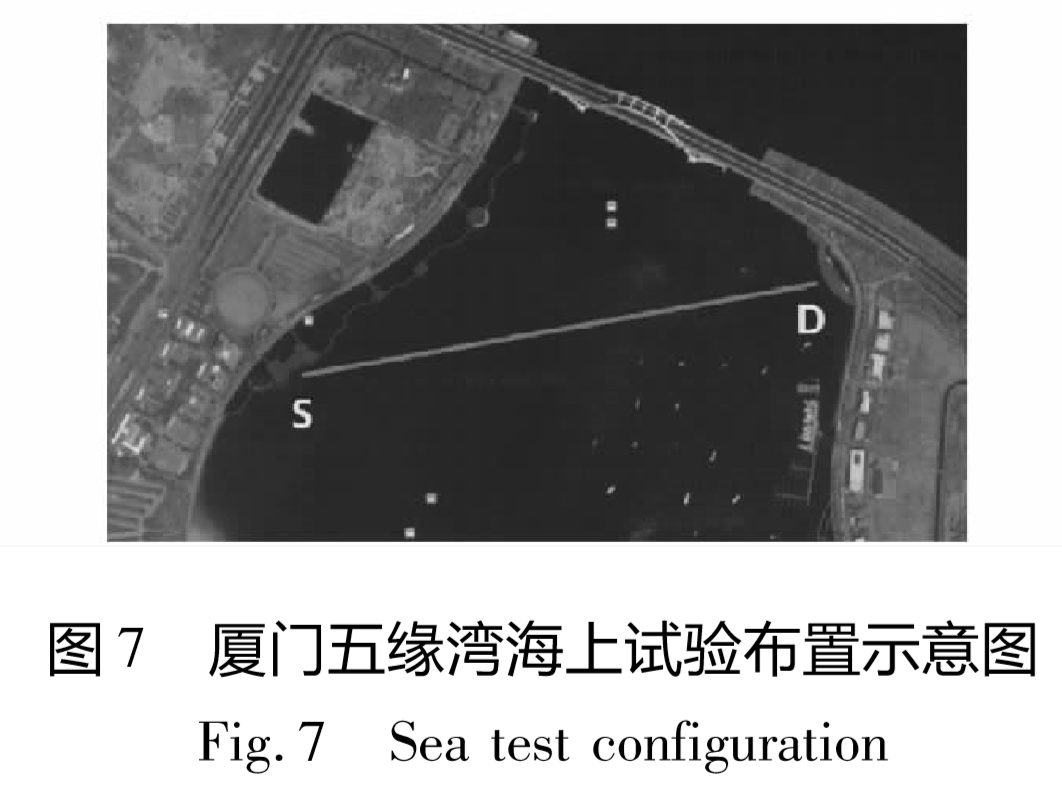
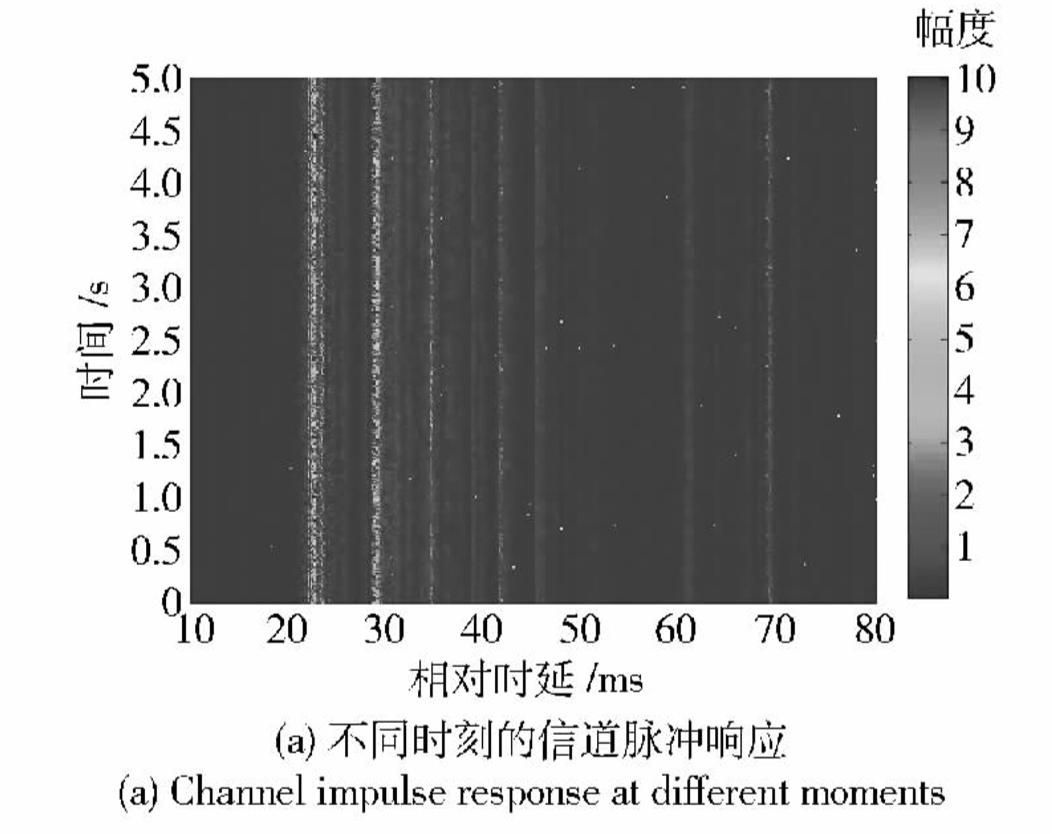
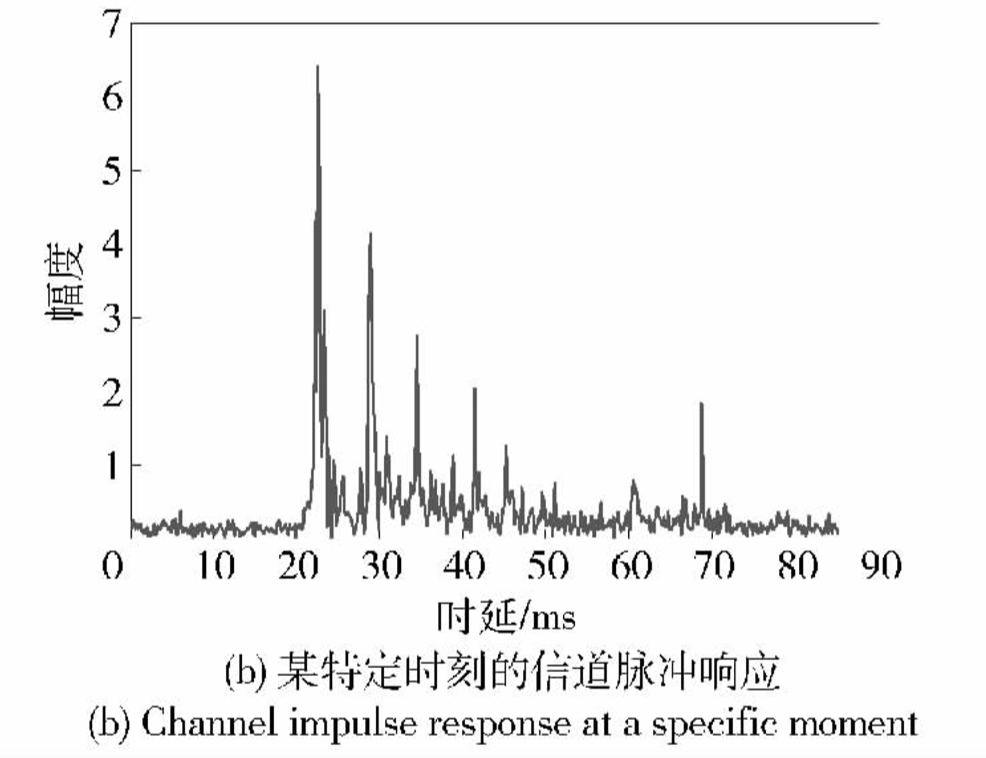 图2 五缘湾水声通信采集的冲激响应
图2 五缘湾水声通信采集的冲激响应
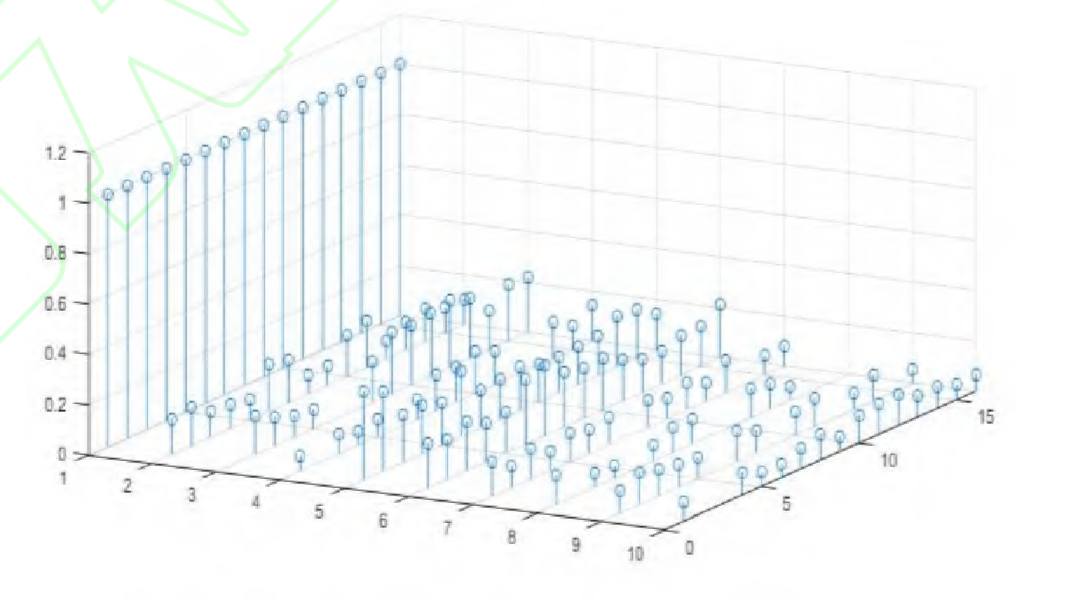
图3 实际海洋信道冲激响应
</center>
参考文献:
[1]陈友淦,许肖梅,张兰,林梅英.浅海水声信道模型差异对纠错码性能分析的影响[J].兵工学报,2013,34(11):1404-1411.
[2]裴月华,苏为,陶金成,江霞林. 一种时变海洋信道建模方法[J]. 系统仿真学报,,:1-9.
我很可爱,请给我钱



- 本文链接:http://www.codekp.cn/2020/11/17/%E6%B0%B4%E5%A3%B0%E9%80%9A%E4%BF%A1%E8%AF%BE%E7%A8%8B/
- 版权声明:本博客所有文章除特别声明外,均默认采用 许可协议。
您可以点击下方按钮切换对应评论系统。
GitHub Issues